David Feil-Seifer[File-Cypher]
Professor, Computer Science & Engineering
University of Nevada, Reno
email: dave (at) cse (dot) unr (dot) edu
phone: (775) 784-6469
Asymmetrical Quad/Hex-Rotor Failsafe Algorithm
PI: David Feil-Seifer; co-PI: Richard Kelley

UNR's robotics lab is currently researching failsafe algorithms for Unmanned Autonomous Systems (UAS) in order to stabilize and control them in the event of motor failure. Upon motor failure, the failsafe algorithms will stabilize the UAS platform thereby allowing it to land safely. These algorithms use the reduced attitude of the UAS to control and stabilize it. This reduced attitude can be used to maneuver the platform a short distance and bring it safely down to the ground.
Without a failsafe mechanism, the loss of a motor will cause a platform to fall out of the sky. This can cause serious injury to people and property in the vicinity of the UAS. Therefore, our failsafe algorithms will increase the safety of UAS during flight and minimize damage to the surroundings by preventing these type of falls from occurring.
We are currently developing failsafe algorithms to stabilize UAS platforms when one motor fails. We are researching algorithms for both asymmetrical quadrocopters and hexacopters. We will be extending these algorithms to the cases of two and three motor failure.
Undergraduates: lead: Janelle Blankenburg; Joshua Curtis
Differences between perceived mistreatment of robot and computer partners
PI: David Feil-Seifer
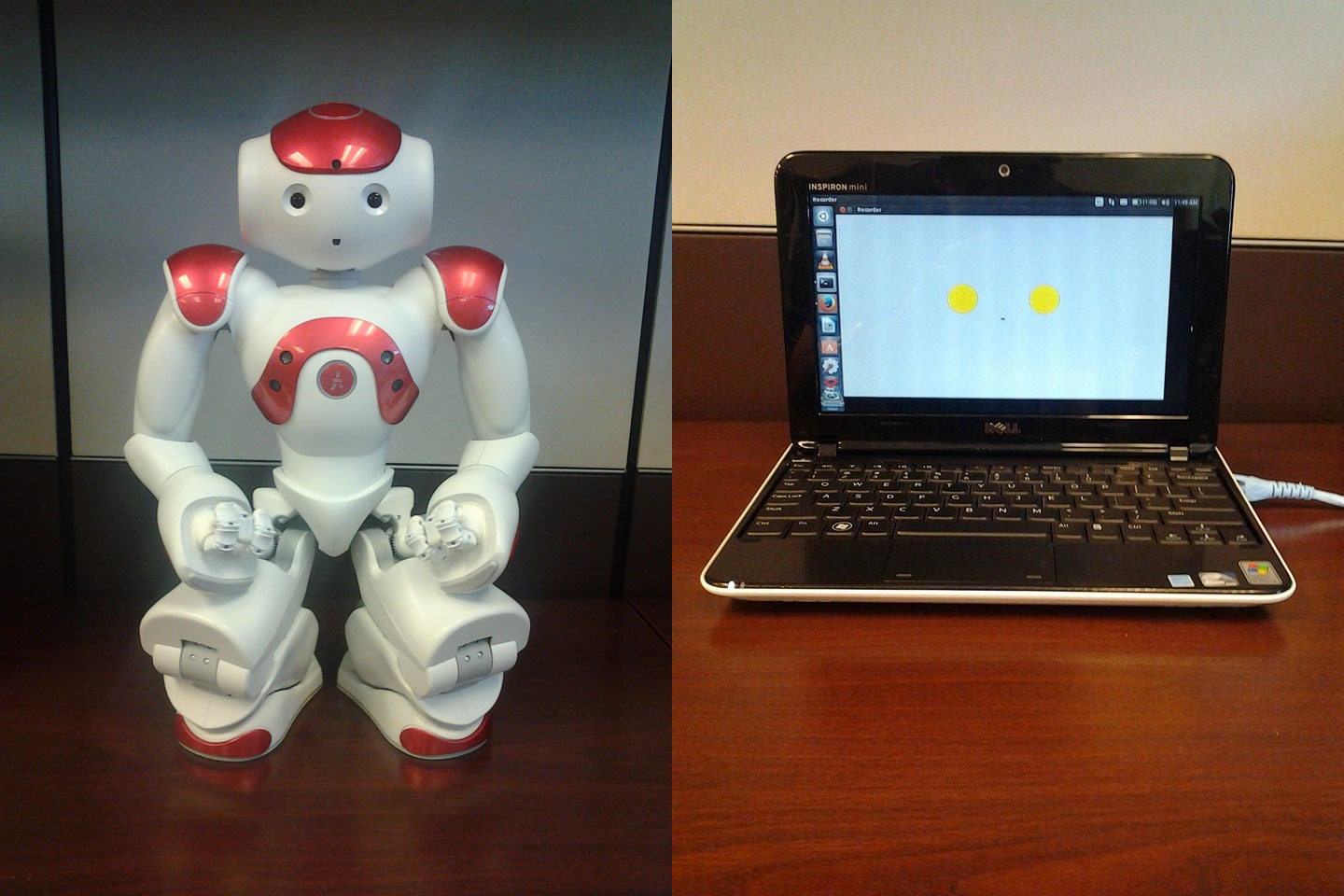
Robots (and computers) are increasingly being used in scenarios where they interact socially with people. How people react to these agents is telling about the perceived animacy of such agents. Mistreatment of robots (or computers) by co-workers might provoke such telling reactions. The purpose of this study was to discover if people perceived mistreatment directed towards a robot any differently than toward a computer. This will provide some understanding of how people perceive robots in collaborative social settings.
We conducted a between-subjects study with 80 participants. Participants worked cooperatively with either a robot or a computer which acted as the 'recorder' for the group. A confederate either acted neutrally or aggressively towards the 'recorder'. We hypothesized that people would not socially accept mistreatment towards an agent that they felt was intelligent and similar to themselves. We also hypothesized that since participants would perceive the robot as more familiar to themselves than a computer, they would observe more mistreatment. The final results supported our hypotheses; the participants observed mistreatment in the robot, but not the computer. Participants felt significantly more sympathetic towards the robot and also believed that it was much more emotionally capable than computer.
Submitted to: International Conference on Human-Robot Interaction (HRI)
Undergraduates: lead: Zachary Carlson; Louise Lemmon; MacCallister Higgins; David Frank
REU- Autonomous Frontier Exploration with a Self-Healing Mesh Network Robot Swarm
PI: Shamik Sengupta; co-PI: David Feil-Seifer
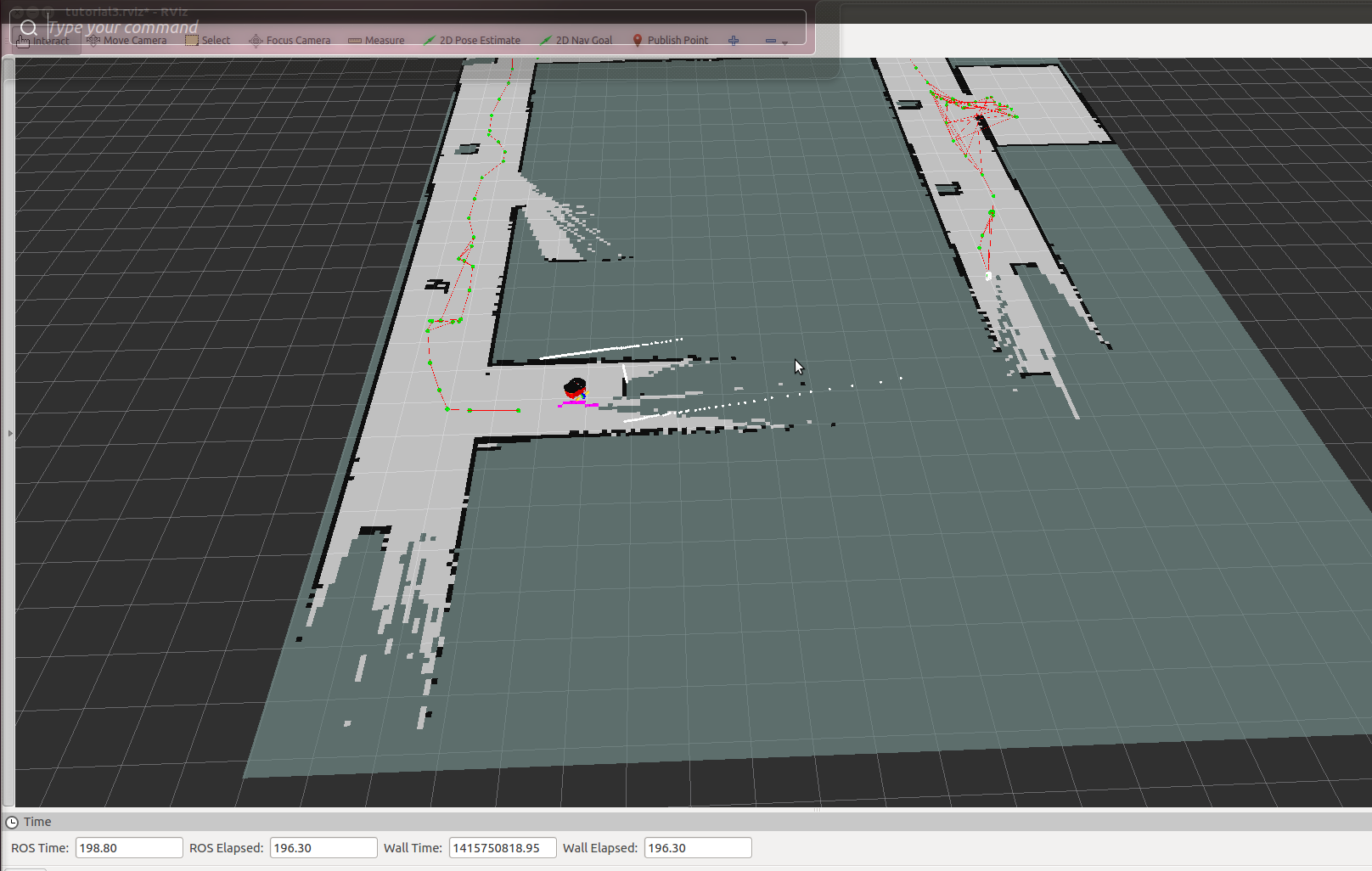
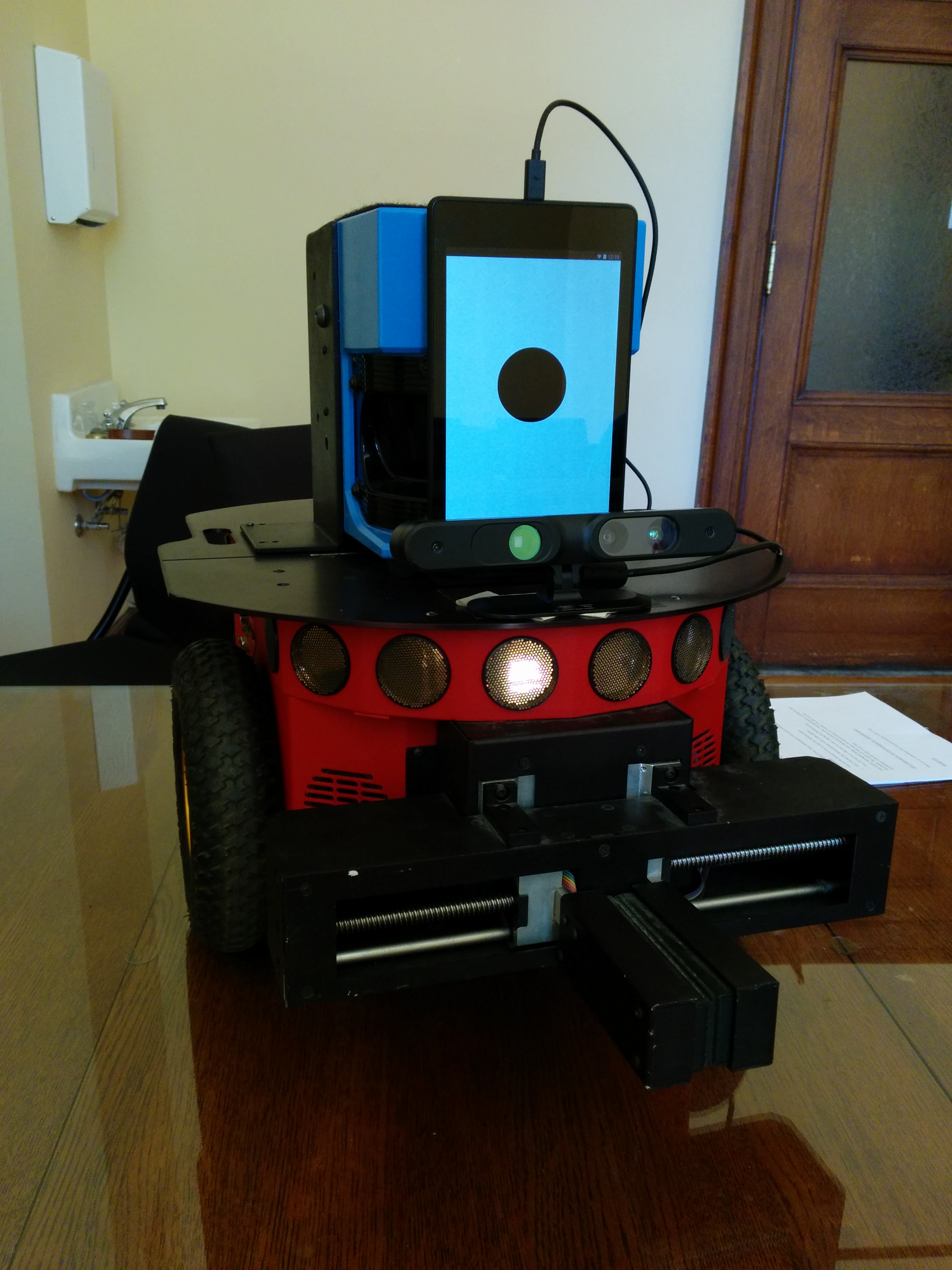
This project utilizes a robot swarm to map out unknown frontiers while maintaining a mesh network among the robots in the swarm. The key innovation of this research will be to use additional robot nodes to compensate for network failures due to the environment or to hostile attacks on the network. Such a self-healing network will be used to explore and monitor unknown environments for public-safety applications. Preliminary stages of the project will be conducted in a 2-dimensional simulator called stage. Later stages of the project will use a swarm testbed of Pioneer P3-DX robots to handle real-world conditions.
A frontier exploration algorithm is utilized to map the unknown region. In this project, we will use the nav2d package by Sebastian Kaperski. The frontier exploration uses simultaneous localization and mapping (SLAM) with a SICK laser to build a map of any unknown regions. Maps generated in this way will be represented in a visualization program (rviz) and can be viewed as image files with other packages like map server.
To implement the self-healing mesh network with a swarm of robots, we will develop a system to detect a gap in the network and deploy a robot to repair that break This means that if a robot goes down, another robot in the swarm will step in and repair the link in communication network between the other active robots in the swarm. It will also have each robot establish and monitor its individual coverage zone. Each robot's coverage zone will be limited by the range of network access and each robot will have unique or minimally overlapping coverage zones.
Undergraduates: lead: Ryan Yee
3D-Printed Humanoid
PI: David Feil-Seifer
![]()
InMoov is an “open source 3D printed Robot” project started by french sculptor Gael Langevin in January 2012. Here at the UNR Robotics Research Lab we are working on replicating Gael’s project while continually looking for more efficient modifications. Humanoid robots have a multitude of possible uses; our focus is human-robot interaction. Making robots more human like allows people with less experience in robotics to be more comfortable to interact with the technology and with better efficiency.
Undergraduates: lead: Will (Frank) Olson
Age Modeling Study
PI: David Feil-Seifer
In the age modeling project, the goal of the project was to study the impact of voice manipulation on perceived age of a robot. The voice of the robot was adjusted to give three models: adult, child and a control. The project tested the effectiveness and perception of the robot during an interaction with an adult playing a flashcard game. The robot was remotely operated and answered 11 correct answers to the flashcard questions and 4 incorrect. The models for adult and control were successful, while the child model was perceived incorrectly and had to be discounted. The study showed that the adult model was perceived overall more positively than the control, which indicated that a human voice in a robot makes people like it more than a 'robot' voice.
Undergraduates: lead: Jessica Smith; Catherine Pollock
