A Distributed Surveillance System
Xiaojing Yuan and Zehang Sun
Department of Computer Science, UNR
 |
|
|
A Distributed Surveillance System Xiaojing Yuan and Zehang Sun
|
|
In order to evaluate the
performance of the two-step surveillance system, tests were
carried out under two scenarios: offline testing using the collected data(336 Vehicle
subimages, 192 Pedestrian subimages and 154 Other subimages), and online testing in real-time
under unconstrained outdoor environment.
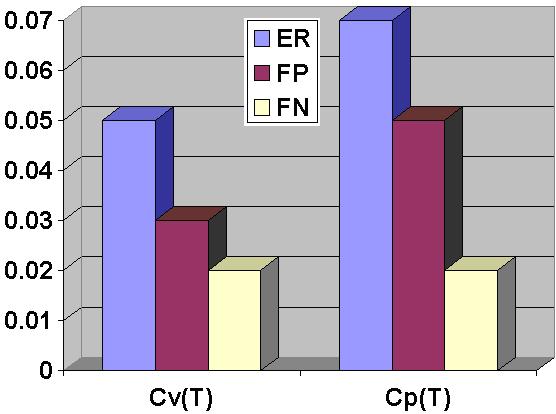
Offline Testing For the off-line testing, we use three-fold cross-validation procedure and record the average error ER, false positive FP and false negative FN. The final results is illustrated in Fig.3 . The detection error rate of Cv(T) is 5%, FP 3% and FN 2%. The detection rate achieved by Cp(T) is slightly worse: ER 7%, FP 5% and FN 2%. One observation here is that the FP rate is higher than FN in both of the two classifiers, which may be due to the relatively small number of Other examples used for training. Given that the Other class is much larger than the Vehicle/Pedestrian class, it would make more sense to include much more Other examples in the training sets.
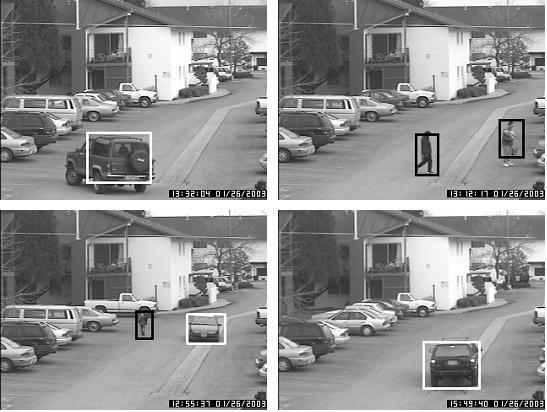
Online Testing This system is on a LAN. If any intrusion (Vehicle/Pedestrian) is detected, the alert will be sent to the server(security office), as well as the video frame. Fig. 4 shows an instance of the alert with the intrusion type (Vehicle), the general location about where it happens(in the observation area of Camera # 1) and bounding boxes specifying intrusion location in that frame (white bounding boxes for Vehicle and black boxes for Pedestrian).
To evaluate the performance of the developed system, we have run it during the daytime over a period of several days. The system exhibits good performance under different illumination conditions. Some representation detection results are illustrated in Fig. 4 and Fig.5. The built system is able to detect multiple presences of the same type of intrusions , as well as different types Fig.4. Although, there is no group of pedestrians in our training data set, it still detected the group of two pedestrians as Pedestrian, see Fig.5, showing good generalization property.
Although we haven't tested it, the performance of the system is expected to degrade under some abnormal conditions, such as, raining, too little contrast between the Pedestrian/Vehicle and background, moving vehicles too close to each other, etc. The current system runs on two laptops(Pentium III 750MHZ, as the terminals) and one desktop(Pentium 200MHZ, as the server) at the speed of 2HZ. We can increase its speed dramatically even with our current computational power. However, a higher processing speed is not necessary in our application scenario - driveway monitoring, given Pedestrian/Vehicle is very slow.
| ||||||||||||||||||||||