Abstract Behavior Representation for Dynamic Behavior Networks
Motivation
Behavior-based control has become one of
the most popular approaches to embedded system control both in
research and in practical applications. Behavior-based systems (BBS)
employ a collection of concurrently executing behaviors, processes
connecting sensors, effectors, and each other. An important property
of BBS is their ability to contain state, and thus also construct and
use distributed representations. This ability has been underused, so
BBS are yet to be explored and extended to their full potential.
This research is trying to address two current limitations of such systems, both having to do with the use of representation.
The first motivation is the fact that behaviors lack the abstract
representation that would allow them to be employed at a high level,
like operators in a plan. Behaviors are typically envoked by buit-in
reactive conditions, and as a consequence, BBS are typically unnatural
for, and thus rarely applied to complex problems that contain temporal
sequences. Since there is no intrinsic limitation within BBS
construction that prevents this capability, we present a
method for taking advantage of it.
The second, and related, motivation for this work is that the vast
majority of behavior-based systems are designed by hand for a single
task. Yet behaviors themselves, once refined, are usually reused by
designers, and this has enabled the gradual accumulation of
behavior libraries. Unfortunately, the remainder of the system that
utilizes such libraries is usually constructed by hand. We seek a
behavior representation that would support behavior reuse for multiple
tasks, each using different subsets of a given behavior repertoire.
Our aim is to conserve the robustness and real-time properties of
behaviors, but avoid cutomized re-design, at least within a class of
related tasks. We describe how a paticular type of behavior
representation makes this possible and practical.
To address these issues, we introduce an abstract behavior
representation, based on behaviors developed for any one or more
specific tasks. It is critical that the practical, robust behaviors
come first, and the representation is derived from them. This stands
in sharp contrast to approaches that employed high-level sensors and
operators assuming that the low-level controller will provide whatever
information and action was needed by a high level planner.
The abstract behaviors are used to specify one or more tasks, in the
form of behavior networks, which can be generated by hand or by an
automated planner, depending on task complexity. Any single network
represents a task-specific BBS, much like standard BBS. However, the
components of the networks are general, allowing for behavior reuse
both off-line (for system specification) and on-line (for system
adaptation to a new task or directive).
Approach
Adapting Behaviors for Representation
BBS behaviors typically consist of a collection of rules, taking
inputs from sensors or other behaviors in the system, and sending
outputs to the effectors, or other behaviors. The inputs determine
the activation level of a behavior; whether it is on or not, and in
some systems by how much. These are the activation conditions
for behavior execution.
In their operation, behaviors individually or as a group achieve
and/or maintain the goals of the system, thus achieving the task.
This methodology lends itself to the construction of highly effective
special-purpose systems. This is thus both a strength and a weakness
of the approach. In order to lend generality to a given system, we
first looked for a way to make the behaviors themselves more general,
while still assuring that they would achieve and/or maintain the goals
for which they are designed.
The key step in adapting specialized behaviors to more general use is
in the separation of the execution conditions from the outputs or
actions. By separating the conditions from the actions, we allow for
a more general set of activation conditions for the outputs or
actions. While this is not necessary for any single task, it is what
provides generality to the system for other tasks. The pairing of a
behavior's conditions and its effects, without the specification of
its inner workings, constitute an abstract behavior.
Intuitively, this is simply an explicit specification of the
behavior's execution conditions (i.e., preconditions) of a given
behavior, and its effects (i.e., postconditions). The result is a an
abstract and general operator much like those used in classical
deliberative systems. The behaviors that do the
work that achieves the specified effects under the given conditions
are called primitive behaviors, and may involve one or an entire
collection of sequential or concurrently executing behaviors, again as
is typical for BBS.
Abstract and primitive behaviors can both be quite complex, just as
they are within any system embedded in an environment. The abstract
behavior conditions, as in any BBS, are typically far from
low-granuarity states, but are instead abstracted, either by hand or
through a generalization process. If they were not, the benefits of
using behaviors as a high-level representation would be lost.
Similarly, the primitive behaviors are no lower level than standard
BBS behaviors, meaning they are typically time-extended sequences of
actions (e.g., go-home), not low-granularity single actions (e.g.,
turn-left-by-10-degrees).
For the purposes of the representation, we distinguish the following
two types of behavior preconditions:
- world preconditions - conditions that activate the
behaviors based on a particular state of the environment.
- sequential preconditions - task-dependent conditions
that must be met before activating the behavior. These are often
postconditions of other existing behaviors, which allows for the
description of complex temporal sequences.
In standard BBS behaviors, both types of preconditions are tested
together, and without discrimination, thus hard-coding a particular
solution. To change tasks and goals, one often makes the most changes
to these preconditions, which much of the rest of behaviors remain
unchanged. The ability to manipulate and change these conditions at
an abstract representation level, separate for the behavior
repertoire/library, is achieved by the introduction of abstract
behaviors.
With those, behaviors are treated as high-level operators, and without
loss of robustness can be employed to generate various strategies or
plans for specific tasks. However, classical planning requires a
specific initial state, while BBS provide general controllers that can
handle a variety of initial conditions. With the use of abstract
behaviors, we generate networks that are BBS, being triggerred by
whatever condition the environment presents.
Behavior networks then are a means of specifying strategies or general
"plans" in a way that merges the advantages of both abstract
representations and behavior-based systems. The nodes in the networks
are abstract behaviors, and the links between them represent
precondition and postcondition dependencies. The task plan or
strategy is represented as a network of such behaviors.
As in any BBS, when the conditions of a behavior are met, the behavior
is activated. Similarly here, when the conditions of an abstract
behavior are met, the behavior activates one or more primitive
behaviors which achieve the effects specified in its postconditions.
The network topology at the abstract behavior level encodes any
task-specific behavior sequences, freeing up the primitive behaviors
to be re-used for a variety of tasks. Thus, since abstract behavior
networks are computationally light-weight, solutions for multiple
tasks can be encoded within a single system, and dynamically switched,
as will be demonstrated in our implementation.
In the next sections we present the structure and functionality of
abstract and primitive behaviors, then the contruction of networks and
their use.
Abstract Behaviors
As mentioned above, adapting specialized behaviors to general use
requires separation between the execution condition and actions. We
group the execution conditions and the behavior effects into abstract
behaviors which have the role of activating the primitive behavior(s)
that achieve the specified effects. The information about the
task-specific preconditions can be automatically obtained from the
behavior network preconditions-postconditions dependences and
dynamically changed if networks are swtiched at run-time. This allows
for obtaining multiple solutions, while using the same behaviors and
maintaining the goals for which they have been designed. Thus, one of
the rules of including the behavior effects into the abstract
representation is to provide information about the behavior's goals
and a means of signaling their achievement to other behaviors that may
utilize (and in fact rely on) these effects.
As with operators in a plan, behaviors can undo each other's actions
while trying to achieve their own goals. In BBS, such
undesirable competition is handled either by mutually-exclusive
behavior execution conditions, or by the behavior coordination
mechanism. In this work, we take the former
approach, and use inhibition between behaviors, a common BBS tool, to
prevent destructive competition. This methodology directly fits into
the behavior network representations: the network topology includes
inhibitory links between competitive behaviors.
In our implementation behaviors run at a predifined rate and this is the rate at which they continuously check or send their inputs and outputs that we will further describe.
In a discrete implementation, single activation and deactivation
messages could be used per behavior, but this would not be as robust.
Our system, as most BBS, uses continual messaging, in order to remain
reactive to any changes that may occur (in the environment, the
preconditions, etc.)
Thus, abstract behaviors (see Figure 1) receive inputs from:
- the environment (through sensors)
- the initialization procedure:
- UseBehavior: input specifies whether
the behavior is used in the network controller (i.e., if this behavior
is a part of the currently executing task)
- PreconditionList: a list of behaviors whose
postconditions must be true in order for this behavior to be active
- any competitive abstract behaviors: {\em Inhibit \/} inputs
prohibit the execution of the behavior
- the corresponding primitive behavior(s): {\em Continue \/} - input signaling that execution should continue
 Figure 1 - Structure of the inputs/outputs of an abstract behavior
Abstract behaviors have the following two outputs:
Figure 1 - Structure of the inputs/outputs of an abstract behavior
Abstract behaviors have the following two outputs:
- Active: connected to one or more primitive behaviors,
specifying whether the behavior(s) should be executed
- IsPostcondTrue: states whether the postconditions of
the behavior are met, based on sensory data
Abstract behaviors continuously check a series of conditions
to determine their activation level, as follows:
- Check the UseBehavior input to see whether the behavior is used
in the current task network. If true, go to the next step, otherwise
return.
- Check the postconditions and set the IsPostcondTrue output
accordingly.
- Check the Inhibition input to see whether the behavior is
inhibited. If false, go to the next step, otherwise return.
- Check the Continue input. If true, set Active to 1 and return.
- Check the preconditions. If met, go to the next step,
otherwise return.
- Check the postconditions of all the behaviors in the
PreconditionList. If met, set Active to 1, otherwise set to 0.
Informally, an abstract behavior will send an activation signal to its
associated primitive behavior(s) if it is being used in the current
controller, it is not inhibited by another competitive behavior, if
its own postconditions are not yet met, and if its preconditions and
the preconditions of its "predecesor behaviors" are met.
Primitive behaviors
Primitive behaviors (see Figure 2) are activated by abstract behaviors. They receive
inputs from:
- the environment
- the abstract behaviors:
- Active: input from an abstract behavior
that initiates or terminates behavior execution
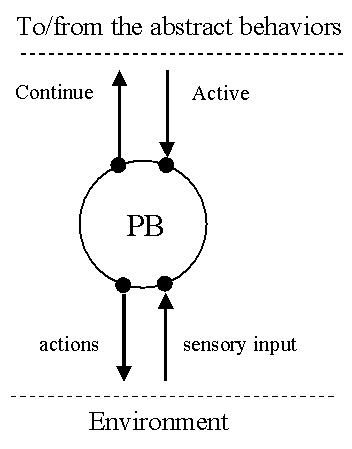 Figure 2 - Structure of the inputs/outputs of a primitive behavior
Primitive behaviors send outputs to:
Figure 2 - Structure of the inputs/outputs of a primitive behavior
Primitive behaviors send outputs to:
- the corresponding abstract behavior: {\em Continue \/}: notifies
that the execution of the behavior is not finished yet so that the
abstract behavior continues to send activation. This output is used only
in situations in which it is important that the execution of the primitive
behavior not be interrupted, like the ones caused by transience of sensory
data. In these cases, it is necessary to extend the execution of the behavior
until its completition. In all other situations, the abstract behavior can
stop sending its activation at any time, according to its current conditions.
- Actions: sends commands to the system's effectors.
A primitive behavior will be executed if it is Active.
Network construction
From a task plan, build by a planner or constructed by hand, a behavior network can be automatically generated
by connecting all the nodes in the graph whose postcondition match the
preconditions of other behaviors. A backtracing process is involved
in generating the topology for the behavior networks. Like a planner,
the system must search backwards from the goal, linking behavior that
achieve the goal and those that achieve its preconditions, and so on.
Figure 3 shows a general example of a behavior network obtained from a
task plan.
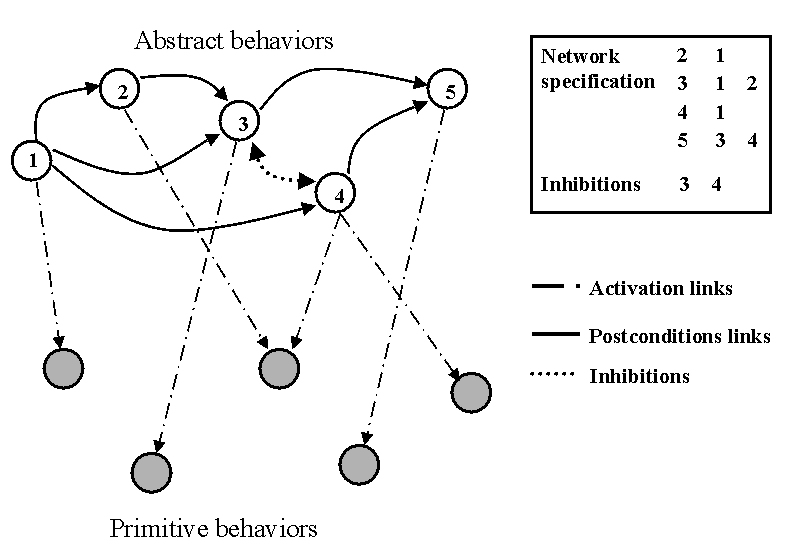 Figure 3 - Structure of a general behavior network with activation and inhibitory lins between abstract behaviors and activation links from the abstract to the primitive behaviors
At initialization, according to a network specification (see Figure
3), each behavior receives a list of its precursor behaviors used to
specify the network topology. Once the network is constructed,
whichever abstract behavior has all of its preconditions met activates
its corresponding primitive behavior(s), thus initiating the
system. The system will proceed by having both sets of behaviors in
concurrent operation. Abstract behaviors activate (and sequence)
primitive ones, and in turn, primitive behaviors can notify abstract
ones about their execution. Note that this is not a
hierarchical arrangement, in that both sets of behaviors depend on
each other, and have the power to influence each other's execution.
This also conserves the spirit of BBS systems, which do not tend to
employ top-down hierarchies.
Figure 3 - Structure of a general behavior network with activation and inhibitory lins between abstract behaviors and activation links from the abstract to the primitive behaviors
At initialization, according to a network specification (see Figure
3), each behavior receives a list of its precursor behaviors used to
specify the network topology. Once the network is constructed,
whichever abstract behavior has all of its preconditions met activates
its corresponding primitive behavior(s), thus initiating the
system. The system will proceed by having both sets of behaviors in
concurrent operation. Abstract behaviors activate (and sequence)
primitive ones, and in turn, primitive behaviors can notify abstract
ones about their execution. Note that this is not a
hierarchical arrangement, in that both sets of behaviors depend on
each other, and have the power to influence each other's execution.
This also conserves the spirit of BBS systems, which do not tend to
employ top-down hierarchies.
Experiments
To validate the proposed concepts, we implemented them on a physical
mobile robot given an object delivery task. The delivery task
consists of a mobile robot in an enclosed environment divided into two
sections, separated by a swinging door. The robot must find a box,
which may be in either section, and push it to the delivery point (see
Figure 5).
The BBS controller must accommodate various initial conditions: the
robot may initially be in the same section as either the box and/or
the delivery point, and the box may or may not be in the same section
as the delivery point. Note that this is not a large state space,
which is why it lends itself to BBS solutions, but it is sufficient
versatile that it would require several different plans if pursued in
a deliberative fashion. Our approach generates two networks which,
together, account for all possibilities, and, as any BBS, adapts to
uncertainty and changes that may occur (i.e., the robot or the box or
both can be moved at any point).
The experiments were performed on a
Pioneer 2-DX
mobile robot, equipped
with two rings of sonars (8 front and 8 rear), a pan-tilt-zoom camera,
a PC104 with an Intel2 processor at 233MHz and 32Mb memory.
All behaviors are sensor-based; the robot uses its camera
to detect the box, the door and its state (open/closed), and the
delivery point.
Behavior Networks for Delivery
The solution for the delivery task was constructed by hand from the
following repertoire of behaviors:
- Localize - the robot wanders around in order to localize
itself with resepect to Home. Achieves Location different than Unknown
- GetBox - the robot wanders in search of the box. Achieves
HaveBox = True or signals Timeout in case the box cannot
be found within a predetermined period of time in the current room.
- GoToDoor - the robot goes to the door. Achieves
AtDoor = True.
- OpenDoor - the robot opens the closed door. Achieves
DoorOpened = True and HaveBox = False (since the robot cannot
carry anything in order to be able to open the door). Dealing with
this type of conflicting goals is described in Section Competitive Behaviors.
- GoThroughDoor - the robot goes through the door to the
next room. Achieves SideRoom = Room X; Room X is a parameter.
- GoHome - the robot goes to its Home location. Achieves
AtHome = True.
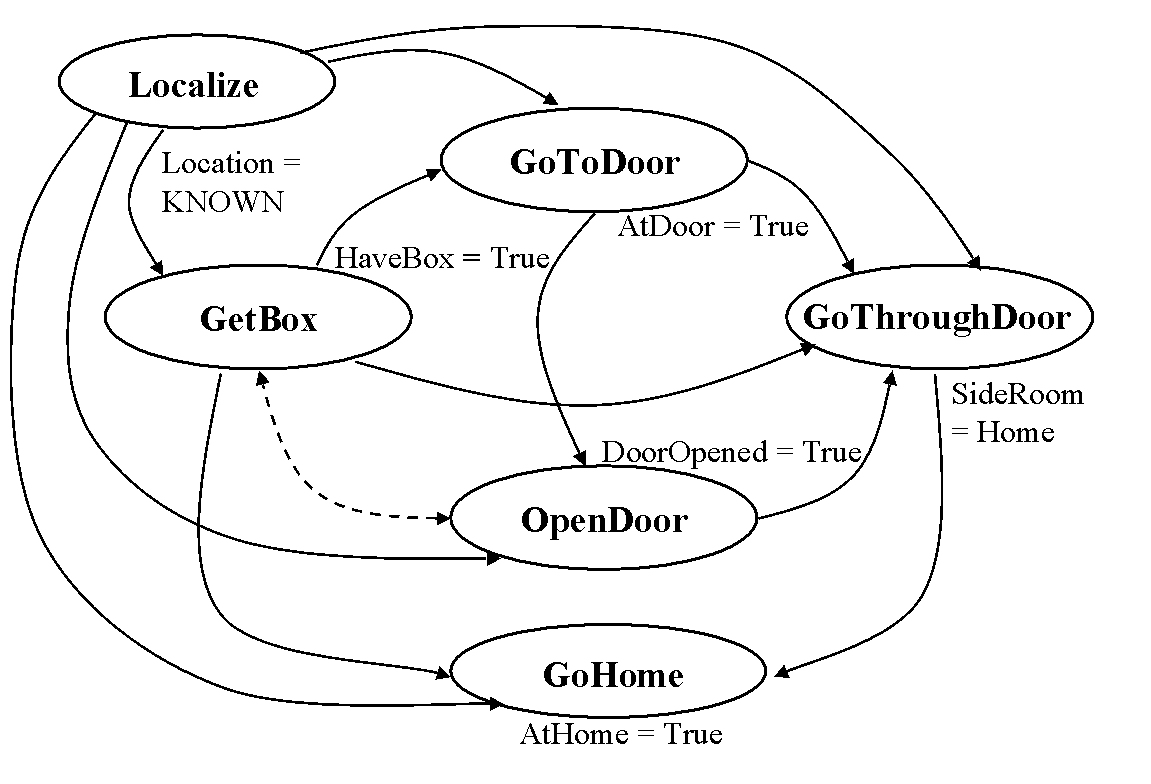
Two different task plans have been developped by hand for the delivery
task and have been translated into behavior networks (Figure 4) that
use the behavior set above. The robot automatically switches between
the networks at run-time, according to predifined changes in the
robot's internal state. This is the only built-in specific information
in our system; it could have been avoided if external cues that could
be sensed directly were available, as described next.
Figure 4 - Structure of the behavior networks for the delivery task
It is important to notice the fact that since our networks rely on real behaviors which can handle a variety of initial conditions we do not need to have a ``plan'' and thus a behavior network for each initial condition. Our solution makes use of only two alternate ``plans'' for the four possible initial conditions.
This, of course, is not the only solution for the task, but we have chosen it because it captures the important aspects of the representation that we want to validate.
The robot begins with the localization behavior (the only one for
which all the execution conditions are met at that point) in order to
determine in which room it is. Its goal of knowing the current
location is a task precondition for all other behaviors (as can be
seen by the network links from Localize to all other behaviors.
Once localized, the robot starts looking for the box. If it finds it
within a predetermined time, it continues to execute the current
behavior network. If it fails to find the box, timeout is signaled,
and the robot switches to another ``plan'', represented by the second
behavior network. The alternate solution is to go to the other room,
and look for the box there. The same GoToDoor, OpenDoor,
GoThroughDoor behaviors are used in both networks, but the
conditions they are testing are different. For example, the second
network need not test the status of GetBox in order to go to the
door and through it, as it would if the box had been found. Another
network switching condition is the completition of the alternate
``plan'' represented by the second network: when this occurs the robot
switches back to its initial network.
Competitive behaviors
In the delivery task, behavior competition arises between the
GetBox and OpenDoor behaviors. While the former drives the
robot to the box if it does not have it yet, the latter requires
pushing the box aside in order to open the door. After getting the
box, the GetBox behavior is no longer active and no longer
inhibits OpenDoor. When OpenDoor becomes active, it
inhibits GetBox until the door is opened. At that point it
deactivates and in turns stops inhibiting GetBox, allowing the
robot to again find the box and take it home through the opened door.
Results
To demonstrate the validity of our representation, and the capability
to dynamically switch between behavior networks, we tested the
delivery task from all four different initial conditions. For each of
them we ran the robot four times, in some cases with the door opened,
in others with it closed. We found that irrespective of the initial
conditions, the robot adapted itself to the state of the environment,
activated the correct behavior network for that state, and executed
its actions accordingly.
We used a marker-based overhead vision system to capture
the robot's movement. Figure 5 shows the trajectory (X and Y coordinates with respect to the low left corner of the enclosure)
of the robot in a run for
which initially both the robot and the box are in the section
different from the one with the delivery point. The robot wanders
around to localize itself with respect to the delivery point, then
gets the box, pushes it to and through the door, and takes it to the
delivery point.
As another validation of the generality and a demonstration of behavior reuse that the abstract representation
provides to behaviors, we have run an experiment with the opposite task
of cleaning (i.e. taking the box out from the room where the delivery point is), using the same set of behaviors and a slightly changed version
of the behavior networks in which for the first network we no longer need the
GoHome behavior, the goal of GoThroughDoor becomes other than Home and for the second network the goal of GoThroughDoor becomes
Home. Irrespective of the two initial positions of the robot
and the box that we have tested (the first with both the robot and the box in the section with the delivery point, the second with the box in the delivery section and the robot in the other), the robot was able to push the box out of the delivery section.