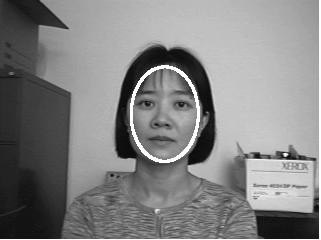
We developed a new approach for estimating a 3D pose of a human face from a monocular image. This algorithm is based on the assumption that the shape of a face can be approximated by an ellipse. Compared to the existing feature-based approaches for face pose estimation, our approach is more robust since an ellipse can be more reliably detected and can embody more compact information about 3D poses.
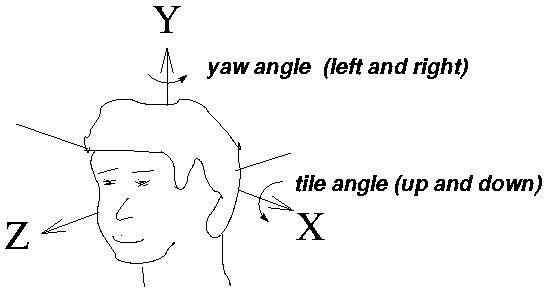
Two angles, called yaw and tile, are used to represent the orientation of a driver's face (see the following figure).
If one of the two angles,
or both of them, exceed a certain degree for a limited time or occur
too frequently, we conclude that the driver is
distracted or is nodding.
The followings
are some of the experimental results.
You can click UP-DOWN.mpg to see the up-down animation of a face ; and you can click LEFT-RIGHT.mpg to see the left-right animation of a face . The lines which point out each image are the normal of the face ellipses. The normal was calculated from the estimated angles of the face. We can see that there is a good agreement between the orientation of the face and the normal.
The following five images are the estimations of a 3D face pose with consecutive yaw rotations. The angles below each images are the estimated yaw angles.
( unit: degree)
|
The following five images are the estimations of a 3D face pose with consecutive tile rotations. The angles below each images are the estimated tile angles.
( unit: degree)
|
For the details about this research, please read our paper:
Psoe
Estimation.ps or Pose
Estimation.pdf