A Distributed Surveillance System
Xiaojing Yuan and Zehang Sun
Department of Computer Science, UNR
 |
|
|
A Distributed Surveillance System Xiaojing Yuan and Zehang Sun
|
|
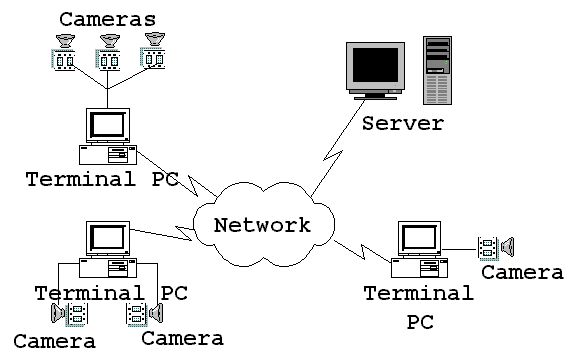
The minimum configuration of the system is one
server connected with one client - a camera connected to and
controlled by a terminal PC, referred to as a Camera Unit
hereafter. In practice, one server will be connected to multiple
clients(Camera Units), each located at a different location.(see Fig.1). The communication between the server and
each client is based on TCP/IP protocols.
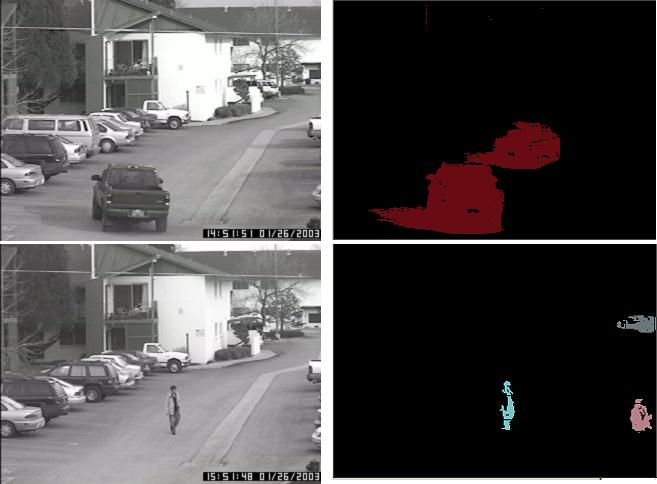
Hypothesis Generation The purpose of the HG stage is to search for the likely Pedestrian/Vehicle presences in a frame. "Background subtraction" method is employed in this paper. Background subtraction is general a very difficult problem . In this paper, we do not put much effort in the background subtraction (HG stage) due to the following reasons: (a). Processing speed is very important in any surveillance systems, the more sophisticated the method is, the more time it requires, and (b). The two-step method (HG followed by HV) limits the system's demanding for background subtraction. The HG stage is used to generate some hypotheses, which will have to pass further verification to trigger an alarm. Even if we have some false hypotheses, we still have big chance to screen them out in the following HV stage. In other words, the difficulties inherited in the background subtraction are mitigated to our HV stage, where some false detection can be easily ruled out. We can see there are false hypotheses in both of the two examples, as illustrated in (Fig. 2}.
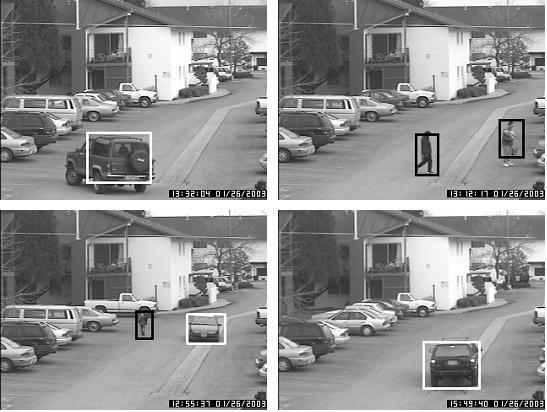
Appearance-based Hypothesis Verification In hypothesis verification, each hypothesis is treated as a three-class pattern classification problem: Vehicle, Pedestrian or Other. Appearance-based methods learn the characteristics of the vehicle class from a set of training images which should capture the variability in Vehicle/Pedestrian appearance. First, each training image is represented by a set of local or global features, then, the decision boundary between the Vehicle and non-vehicle classes, as well as the boundary between the Pedestrian and Non-pedestrian class, is learned by training a classifier. Current system uses Gabor filter as feature extraction method and SVMs as the classifier. SVMs are primarily two-class classifiers that have been shown to be an attractive and more systematic approach to learning linear or non-linear decision boundaries by performing structural risk minimization. To detection Vehicle/Pedestrian, we use the following rules:
where Cv(T) is the trained classifier used to separate Vehicle against Non-vehicle(Pedestrian and Other), Cp(T) is to separate Pedestrian against Non-pedestrian(Vehicle and Other), and c is a predefined threshold.
| |||||||||||||||