Precrash Vehicle Detection
Zehang Sun
Department of Computer Science, UNR
| Advisors: Dr. George Bebis Dr. Ronald Miller |
 |
|
|
Precrash Vehicle Detection Zehang Sun
|
|
A forward facing camera has been installed inside Ford's
prototype vehicle which is connected to a frame-grabber of a normal PC
(see Fig.1). The PC is sitting inside the vehicle and is powered up by
a converter in the car. An embedded system will be used to replace the PC very soon.
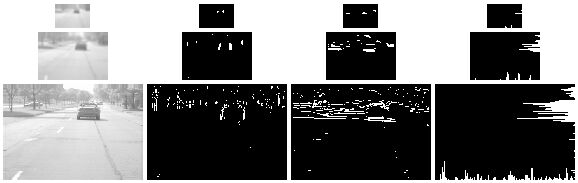
We developed a two step vehicle detection algorithm: multi-scale driven hypothesis generation, which hypothesizes the locations in images, where vehicles might be present and appearance-based hypothesis verification, which verifies the hypotheses. Multi-scale Driven Hypothesis Generation The observation that the appearance of vehicles contains lots of horizontal and vertical structures plays an important role in the vehicle detection literature. To hypothesize possible vehicle locations in an image, as we expected, some edge detection and profile analysis technologies have been tested. An open problem with this method is how the choice of various parameters in this procedure affect system robustness. These parameters include the threshold values for the edge detectors, the threshold values picking the most important vertical and horizontal edges, and the threshold values for choosing the best maxima (i.e., peaks) in the profile images. To deal with this important issue we propose using a multi-scale approach. The multi-scale approach combines a sub-sampling operation with a smoothing operation to hypothesize possible vehicle locations. The proposed multi-scale approach improves system robustness by making the detection less sensitive to the choice of parameters. Forming the first hypotheses at the lowest level of detail is very useful since this level contains only the most salient structural features. Besides improving robustness, the multi-scale scheme speeds-up the whole process since the low resolution images have much simpler structure as illustrated in (Fig. 2}
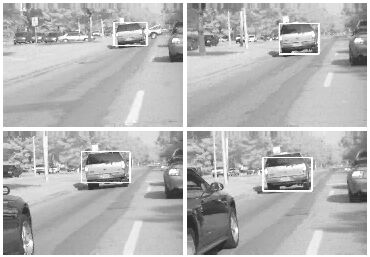
Appearance-based Hypothesis Verification In hypothesis verification, each hypothesis is treated as a two-class pattern classification problem: vehicle vs non-vehicle. Appearance-based methods learn the characteristics of the vehicle class from a set of training images which should capture the variability in vehicle appearance. Usually, the variability of the non-vehicle class is also modelled to improve performance. First, each training image is represented by a set of local or global features, then, the decision boundary between the vehicle and non-vehicle classes is learned by training a classifier. Gabor filters and the Wavelet transform were exploited in our previous studies to exact features, demonstrating good performance. The main classifier in our study is Support Vector Machines (SVMs). SVMs are primarily two-class classifiers that have been shown to be an attractive and more systematic approach to learning linear or non-linear decision boundaries by performing structural risk minimization.
|
|||||||||
|
| Main |
Overview | Methodology | Results
| Future Work | Publications | Acknowledgement |
| Ford Motor Company | NSF | UNR-CVL | UNR-Home Page | |