Precrash Vehicle Detection
Zehang Sun
Department of Computer Science, UNR
| Advisors: Dr. George Bebis Dr. Ronald Miller |
 |
|
|
Precrash Vehicle Detection Zehang Sun
|
|
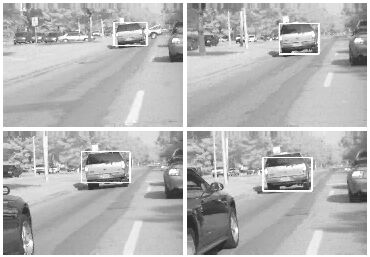
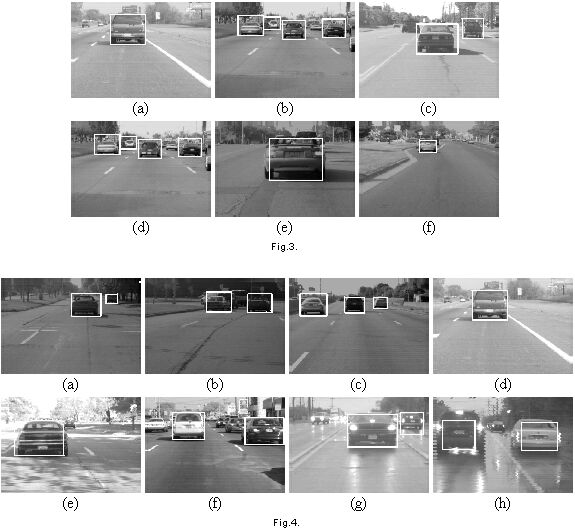
In order to evaluate the performance of the
two-step vehicle detection system, tests were carried out under
different driving condition. Fig. 3 and
Fig.4 show some representative detection results. The
bounding boxes superimposed on the original image indicate the
final detection. Fig.1 shows detection results on
simply structured roads like a national highway, and Fig.4(a-f)
under an urban traffic scenario. The performance of the system degraded when we drove the
prototype vehicle under some abnormal conditions, Fig. 4 (g-h)
presents two successful examples under this scenario.
We have achieved a frame rate of approximately 10 frame per second using a standard PC machine (Pentium III 1,133MHZ) and without making particular efforts to optimize our software. If the vehicle's speed is about 70mph, 10Hz corresponds to a 3 meter interval. For many situations, this level of resolution is sufficient.
|
|
| Main |
Overview | Methodology | Results
| Future Work | Publications | Acknowledgement |
| Ford Motor Company | NSF | UNR-CVL | UNR-Home Page | |