Precrash Vehicle Detection
Zehang Sun
Department of Computer Science, UNR
| Advisors: Dr. George Bebis Dr. Ronald Miller |
 |
|
|
Precrash Vehicle Detection Zehang Sun
|
|
Precrash sensing is an area of active research
among automotive manufacturers, suppliers and Universities with
the aim of reducing injury and accident severity. The ability to
process sporadic sensing data from multiple sources (radar,
camera, and wireless communication) and to determine the
appropriate actions (belt-pretensioning, airbag deployment,
brake-assist) forms the basis of this research and is essential in
the development of active and passive safety systems. Vision systems
represent a principal component in precrash sensing and, with the
introduction of inexpensive camera systems, can form a ubiquitous
sensing tool for all vehicles.
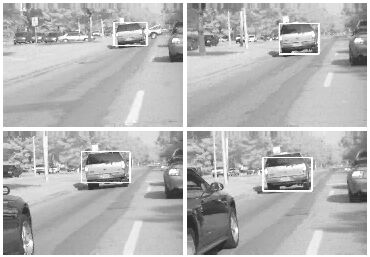
Robust and reliable vehicle detection is one of the most important issues in any in-vehicle optical system, with applications to driver assistance systems or autonomous, self-guided vehicles. Several factors make on-road vehicle detection very challenging including variability in scale, location, orientation, and pose. Vehicles, for example, come into view with different speeds and may vary in shape, size, and color. Vehicle appearance depends on its pose and is affected by nearby objects. In-class variability, occlusion, and lighting conditions also change the overall appearance of vehicles. Landscape along the road changes continuously while the lighting conditions depend on the time of the day and the weather. Moreover, real-time constraints make this task even more challenging. The focus of this project is to develop a reliable real-time on-road vehicle detection system and put down the fist building block for the life-saving in-vehicle vision-guide system.
|
|
| Main |
Overview | Methodology | Results
| Future Work | Publications | Acknowledgement |
| Ford Motor Company | NSF | UNR-CVL | UNR-Home Page | |