|
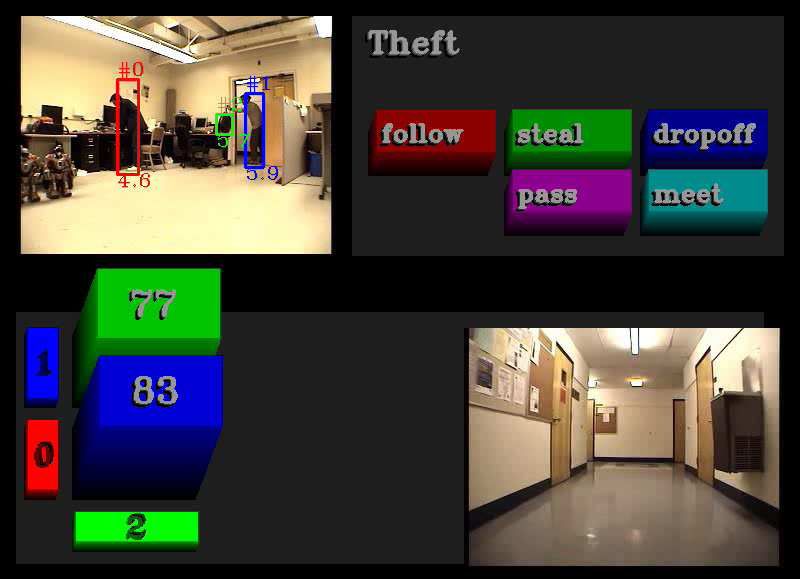
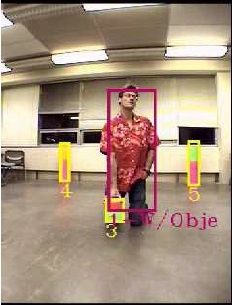
Understanding intent is an important aspect of communication among people and is an essential component of the human cognitive system. This capability is particularly relevant for situations that involve collaboration among multiple agents or with robotic systems, or detection of situations that can pose a particular threat. For surveillance or military applications, it is highly important to enable understanding the intent of relevant agents in the environment, from their current actions, before any attack strategies are finalized. The approach relies on a novel formulation of Hidden Markov Models (HMMs), which allows a robot to understand the intent of other agents by virtually assuming their place and detecting their potential intentions based on the current situation. This allows the system to recognize the intent of observed actions before they have been completed, thus enabling preemptive actions for defense. The system's capability to observe and analyze the current scene employs novel vision-based techniques for target detection and tracking, using a non-parametric recursive modeling approach.
|
- Richard Kelley, Alireza Tavakkoli, Christopher King, Amol Ambardekar, Monica Nicolescu, Mircea Nicolescu,
"Context-Based Bayesian Intent Recognition",
IEEE Transactions on Autonomous Mental Development - Special Issue on Biologically-Inspired Human-Robot Interactions,
vol. 4, no. 3, pages 215-225, September 2012.
- Alireza Tavakkoli, Richard Kelley, Christopher King, Mircea Nicolescu, Monica Nicolescu, George Bebis,
"A Visual Tracking Framework for Intent Recognition in Videos",
Proceedings of the International Symposium on Visual Computing,
pages 450-459, Las Vegas, Nevada, December 2008.
- Richard Kelley, Christopher King, Alireza Tavakkoli, Mircea Nicolescu, Monica Nicolescu, George Bebis,
"An Architecture for Understanding Intent Using a Novel Hidden Markov Formulation",
International Journal of Humanoid Robotics - Special Issue on Cognitive Humanoid Robots,
vol. 5, no. 2, pages 203-224, June 2008.
- Richard Kelley, Alireza Tavakkoli, Christopher King, Monica Nicolescu, Mircea Nicolescu, George Bebis,
"Understanding Human Intentions via Hidden Markov Models in Autonomous Mobile Robots",
Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction,
pages 367-374, Amsterdam, Netherlands, March 2008.
- Alireza Tavakkoli, Richard Kelley, Christopher King, Mircea Nicolescu, Monica Nicolescu, George Bebis,
"A Vision-Based Architecture for Intent Recognition",
Proceedings of the International Symposium on Visual Computing,
pages 173-182, Lake Tahoe, Nevada, November 2007.
|